|
I am a PhD student at Stanford advised by Dorsa Sadigh. My research is supported by the NDSEG Fellowship. I was also awarded the NSF Graduate Research Fellowship. Previously, I graduated from UC Berkeley with an MS in Computer Science and BA in Computer Science and Applied Math. I was fortunate to be advised by Pieter Abbeel, Stephen James, and Youngwoon Lee at BAIR.
Contact: amberxie@stanford.edu
|

|
|
I'm interested in robot learning. In particular, I would like to build intelligent, adaptable, multi-purpose robots that can learn quickly and accomplish complex tasks. I've worked on a variety of projects in deep reinforcement learning, imitation learning, and generative models to this aim. |
|
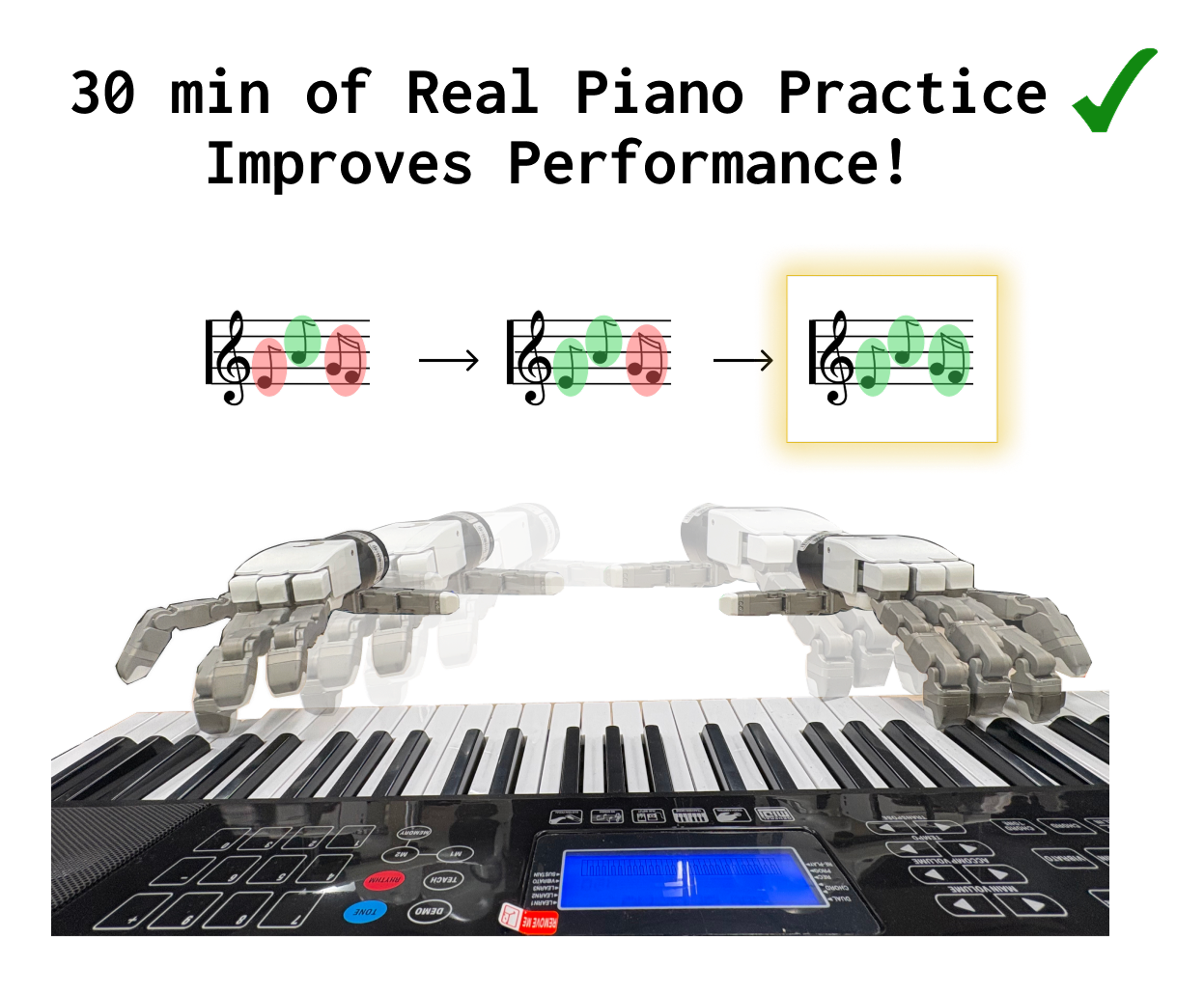
Amber Xie, Haozhi Qi, Dorsa Sadigh paper / website / code Handelbot is the first learning-based system for real-world, two-handed piano playing. We train a simulation policy, and adapt it to the real world using policy refinement and residual RL. |
|
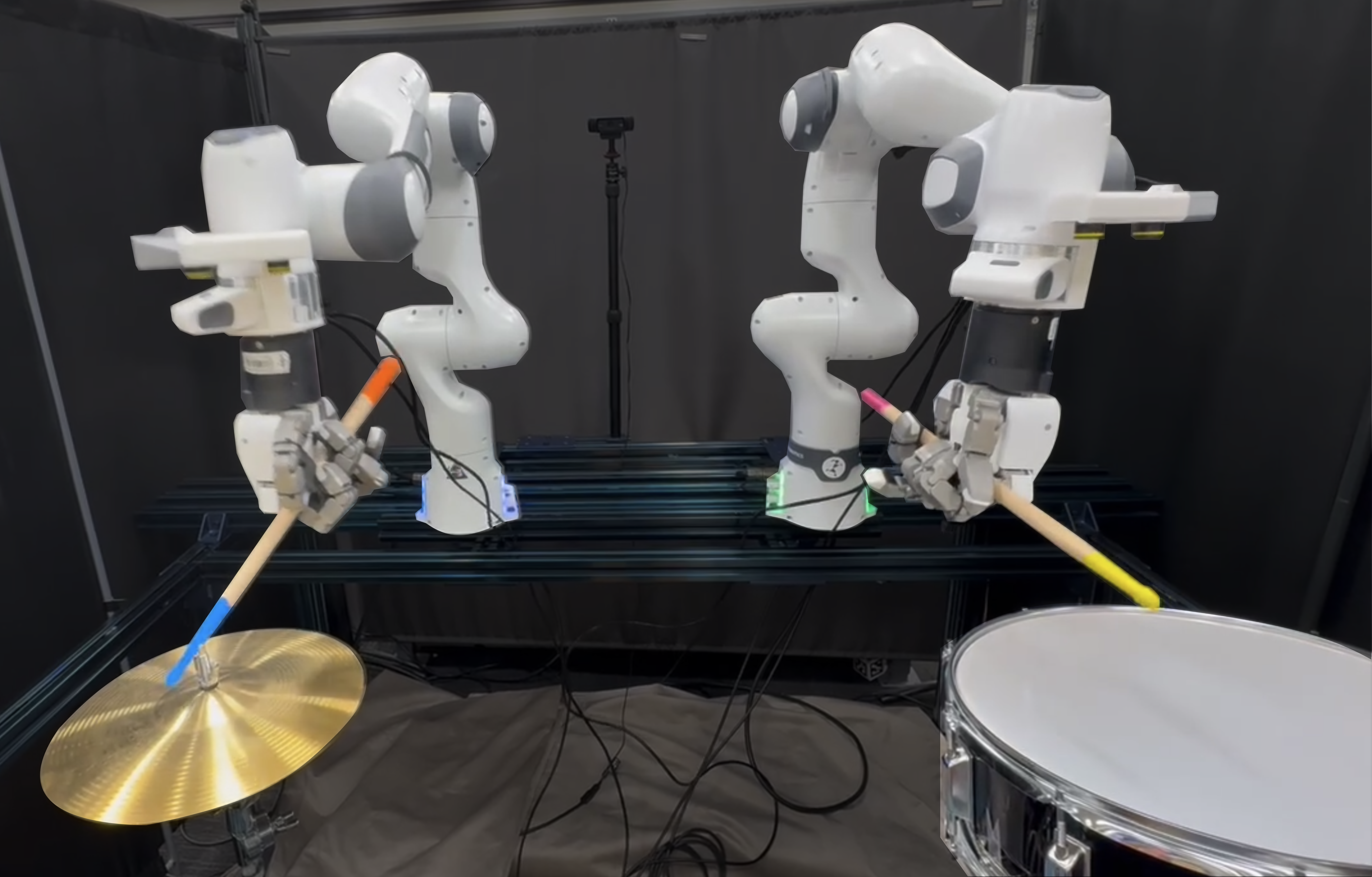
Hung-Chieh Fang, Amber Xie, Jennifer Grannen, Kenneth Llontop, Dorsa Sadigh paper / website / code Manipulation often requires dexterous in-hand tool use, complex contact interactions, and stability over long horizons. We propose DexDrummer, a hierarchical sim-to-real framework that integrates these capabilities within a unified drumming testbed. |
|
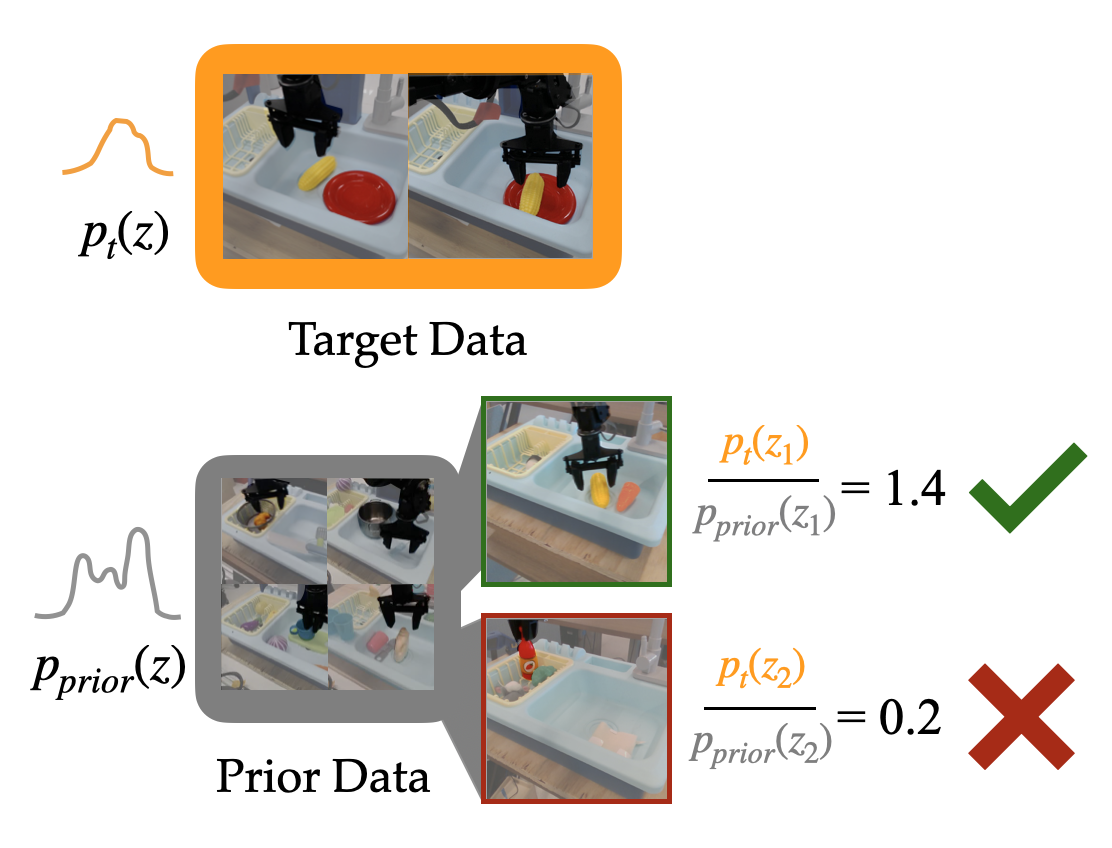
Amber Xie, Rahul Chand, Dorsa Sadigh, Joey Hejna CoRL 2025 Oral Presentation Conference on Robot Learning, 2025 paper / website / code Importance Weighted Retrieval (IWR) is a retrieval method that estimates importance weights, or the ratio between the target and prior data distributions, using Gaussian KDEs. |
|
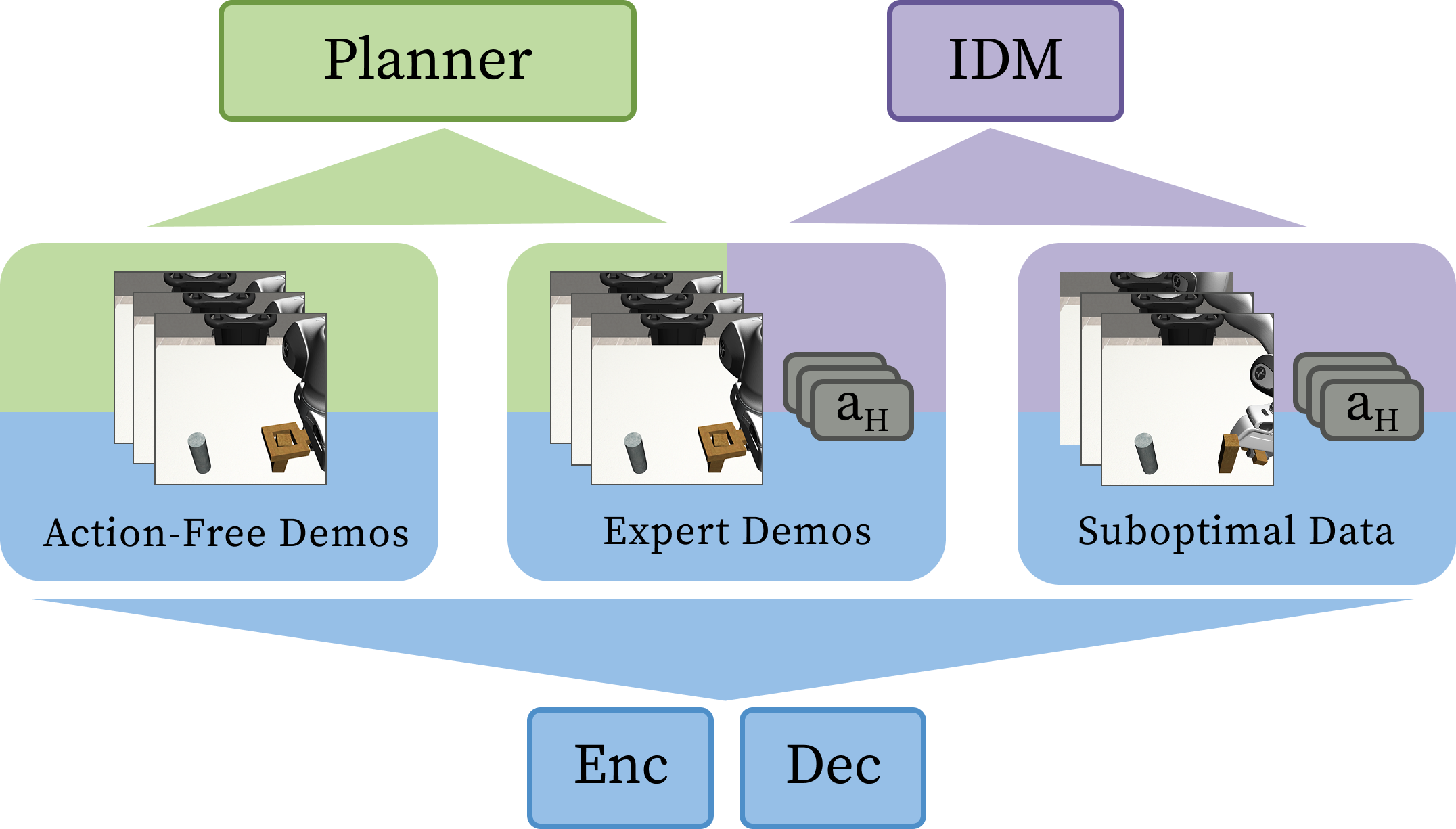
Amber Xie, Oleh Rybkin, Dorsa Sadigh, Chelsea Finn ICML 2025 Spotlight (top 2.6%) International Conference on Machine Learning, 2025 paper / website / code We propose Latent Diffusion Planning (LDP), a modular approach consisting of a planner which can leverage action-free demonstrations, and an inverse dynamics model which can leverage suboptimal data, that both operate over a learned latent space. |
|
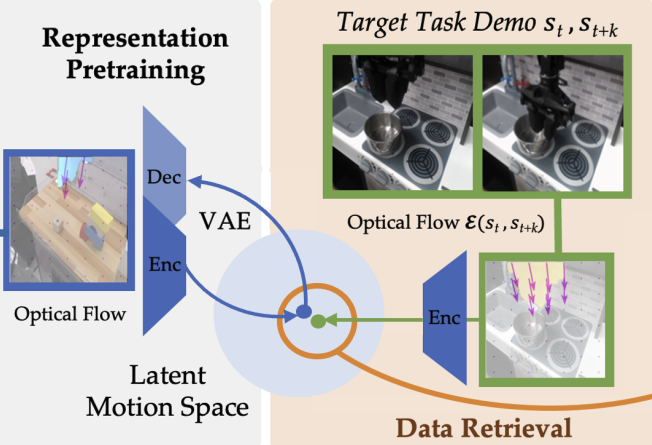
Li-Heng Lin, Yuchen Cui, Amber Xie, Tianyu Hua, Dorsa Sadigh CoRL 2024 Conference on Robot Learning, 2024 paper / website / code FlowRetrieval leverages optical flow representations for extracting relevant prior data and guiding policy learning to maximally benefit from the retrieved data. |

|
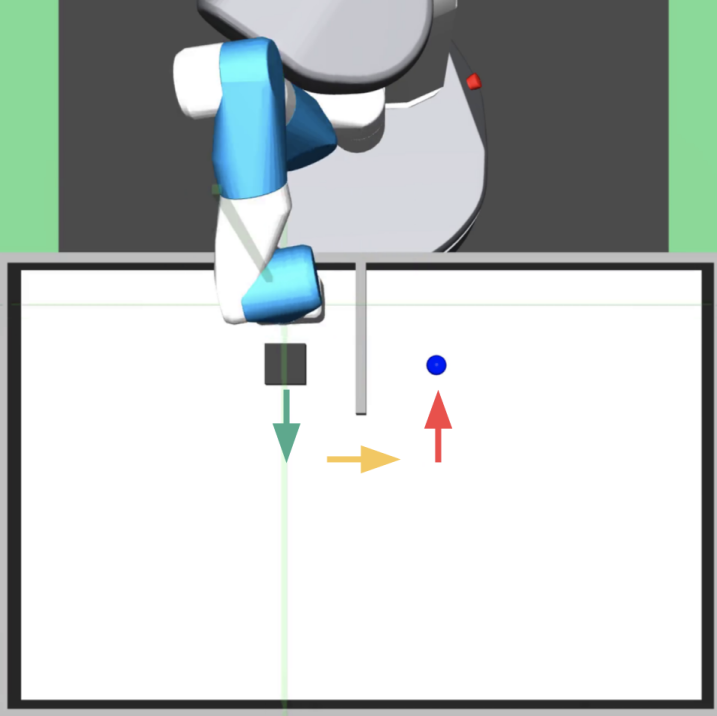
Amber Xie, Youngwoon Lee, Pieter Abbeel, Stephen James CoRL 2023 Conference on Robot Learning, 2023 paper / website / code / video We propose the domain of Language-Conditioned Path Planning (LAPP), where contact-awareness is incorporated into the path planning problem. As a first step, we propose Language-Conditioned Collision Functions (LACO). |
|
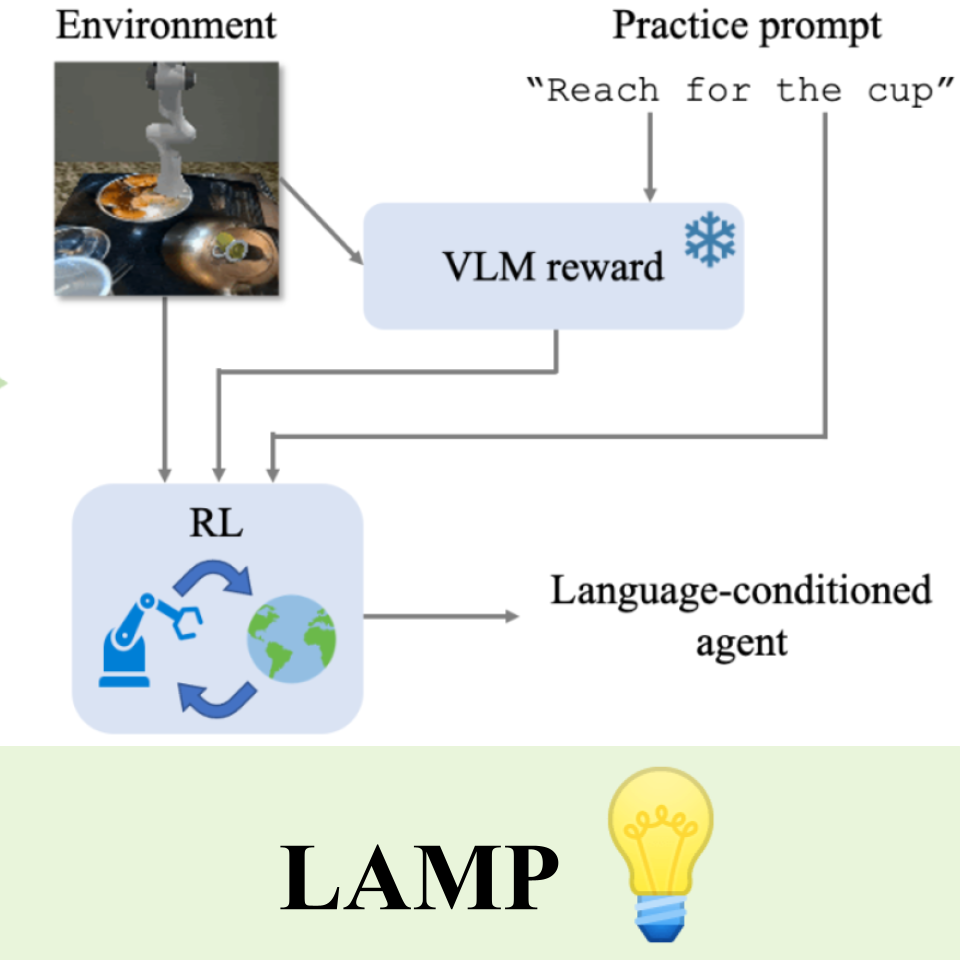
Ademi Adeniji, Amber Xie, Carmelo Sferrazza, Younggyo Seo, Stephen James, Pieter Abbeel paper / code LAMP pretrains a language-conditioned agent without human supervision using noisy VLM rewards and unsupervised reinforcement learning. |

|
Ajay Jain*, Amber Xie*, Pieter Abbeel CVPR 2023 The IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023 paper / website / gallery VectorFusion generates infinitely scalable vector graphics (SVGs), pixel art and sketches from text using the pretrained Stable Diffusion model. |
|
Ademi Adeniji*, Amber Xie*, Pieter Abbeel paper / code IRM leverages the skill discriminator from unsupervised RL pretraining to perform environment-interaction-free skill sequencing for unseen downstream tasks. |

|
John So*, Amber Xie*, Sunggoo Jung, Jeffrey Edlund, Rohan Thakker, Ali-akbar Agha-mohammad, Pieter Abbeel, Stephen James CoRL 2022 Conference on Robot Learning, 2022 paper / website / code / method vid / real-world vid Segmentations are a concise, compressed representation for images. We show sim-to-real transfer through training an RL agent on image segmentations for off-road autonomous driving. |
|
Website template from Jon Barron |